19 世纪和 20 世纪电力领域的科学迅速发展,这导致了感应电动机的诞生。在这些设备的帮助下,工业工业的发展向前迈进了一大步,现在无法想象没有使用异步电动机的动力机器的工厂和工厂。
外观历史
异步电动机的创造历史始于 1888 年,当时 尼古拉·特斯拉 同年,另一位电气工程领域的科学家获得了电动机电路的专利 伽利略费拉里斯 发表了一篇关于异步电机运行的理论方面的文章。
1889年俄国物理学家 米哈伊尔·奥西波维奇·多利沃-多布罗沃尔斯基 在德国获得异步三相电动机专利。

所有这些发明都使改进电机成为可能,并导致电机在工业中的大量使用,从而显着加快了生产中的所有工艺流程,提高了工作效率,降低了劳动强度。
目前,工业中最常用的电动机是 Dolivo-Dobrovolsky 制造的电动机原型。
异步电动机的装置和工作原理
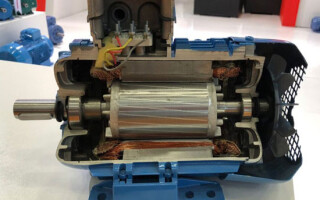
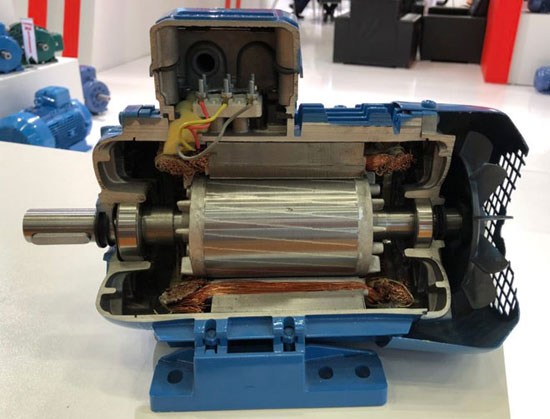
感应电动机的主要部件是定子和转子,它们通过气隙相互隔开。发动机中的主动功由转子的绕组和铁芯完成。
发动机的异步性被理解为转子速度与电磁场旋转频率之间的差异。
定子 - 这是发动机的固定部分,其核心由电工钢制成并安装在框架中。床是由非磁性材料以铸造方式制成的(铸铁, 铝)。定子绕组是一个三相系统,其中导线铺设在偏转角为 120 度的凹槽中。绕组的相位根据“星形”或“三角形”方案标准地连接到网络。

转子 它是发动机的运动部件。异步电动机的转子有两种类型:鼠笼式转子和相转子。这些类型在转子绕组的设计上彼此不同。
异步鼠笼式电机
这种类型的电机首先由 M.O. 获得专利。 Dolivo-Dobrovolsky,通常被称为 “松鼠轮” 由于结构的外观。短路转子绕组由用环短接的铜棒组成(铝, 黄铜) 并插入转子铁芯绕组的凹槽中。这种类型的转子没有动触点,因此这些电机运行非常可靠和耐用。
带相转子的感应电动机
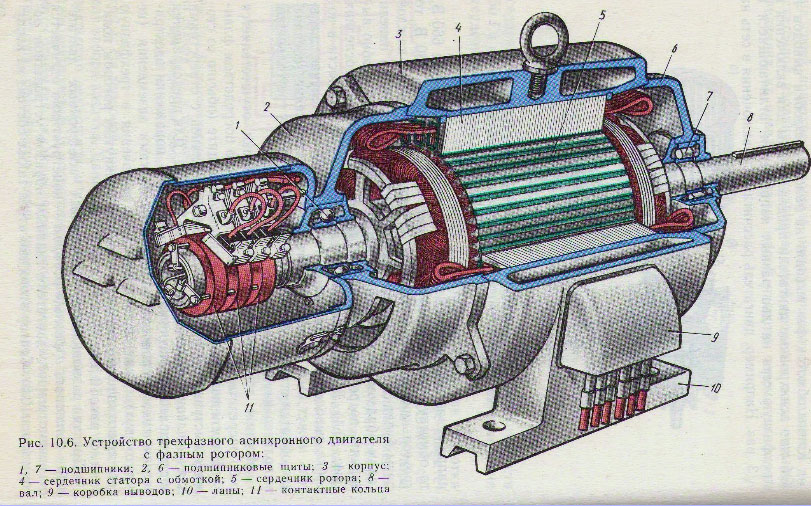
这样的设备使您可以在很宽的范围内调整工作速度。相转子是一个三相绕组,按“星形”或三角形方案连接。在这种电动机中,设计中有特殊的刷子,您可以使用它们来调节转子的速度。如果在这种发动机的机构中增加一个特殊的变阻器,那么当发动机启动时,有源电阻会降低,从而启动电流会降低,这会对电网和设备本身产生不利影响。
工作原理
当电流施加到定子绕组时,会产生磁通量。由于相位相对于彼此偏移120度,因此,绕组中的流动旋转。如果转子短路,那么随着这种旋转,转子中会出现电流,从而产生电磁场。转子和定子的磁场相互作用,使电动机的转子旋转。如果转子是同相的,那么电压会同时施加到定子和转子上,每个机构中都会出现磁场,它们相互作用并旋转转子。
异步电机的优点
| 带鼠笼式转子 | 带相位转子 |
|---|---|
| 1.简单的装置和发射电路 | 1.启动电流小 |
| 2. 制造成本低 | 2.能够调整旋转速度 |
| 3.随着负载的增加,轴速不变 | 3.在不改变速度的情况下处理小过载 |
| 4.能够承受短期过载 | 4.可应用自动启动 |
| 5.运行可靠耐用 | 5、扭矩大 |
| 6.适用于所有工作条件 | |
| 7.具有高效率 |
异步电动机的缺点
| 带鼠笼式转子 | 带相位转子 |
|---|---|
| 1.转子转速不可调 | 1. 大尺寸 |
| 2.启动扭矩小 | 2.效率较低 |
| 3.启动电流大 | 3、刷子磨损导致频繁维护 |
| 4. 一些设计复杂性和移动触点的存在 |
异步电机是非常高效的设备,具有出色的机械特性,这使其在使用频率方面处于领先地位。
操作模式

异步电动机是一种通用机构,在运行期间有多种模式:
- 连续的;
- 短期;
- 定期;
- 重复-短期;
- 特别的。
连续模式 - 异步设备的主要操作模式,其特点是电动机在恒定负载下持续运行而不会停机。这种经营方式最为普遍,在工业企业中到处使用。
瞬时模式 - 工作直到达到恒定负载一段时间(10 到 90 分钟),没有时间尽可能地热身。之后它会关闭。此模式用于提供工作物质(水、油、气) 和其他情况。
周期性模式 - 工作持续时间具有一定的价值,并在工作循环结束时关闭。工作模式启动-工作-停止。同时,它可以关闭一段时间,在此期间它没有时间冷却到外部温度并再次打开。
间歇模式 - 发动机没有加热到最大,也没有时间冷却到外部温度。用于电梯、自动扶梯等设备。
特别制度 - 包含的持续时间和期限是任意的。
在电气工程中,有一个电机可逆性原理——这意味着该设备既可以将电能转换为机械能,又可以执行相反的动作。
异步电动机也符合这一原理,并具有电动机和发电机的运行模式。
电机模式 - 异步电动机的主要运行模式。当电压施加到绕组上时,会产生电磁转矩,带动转子与轴一起旋转,从而轴开始旋转,发动机达到恒定转速,做有用功。
发电机模式 - 基于在转子旋转期间在电机绕组中激发电流的原理。如果电机转子机械旋转,则在定子绕组上形成电动势,在绕组中存在电容器的情况下,会出现电容电流。如果电容器的电容量为一定值,则根据发动机的特性,发电机会自励,出现三相电压系统。因此,鼠笼式电动机将用作发电机。
异步电动机的速度控制
为了调节异步电动机的转速并控制其运行模式,有以下方法:
- 频率——当电网中电流的频率发生变化时,电动机的转动频率就会发生变化。对于这种方法,使用了一种称为变频器的设备;
- 变阻器——当转子中变阻器的电阻发生变化时,转速就会发生变化。这种方法增加了启动扭矩和临界滑差;
- 脉冲 - 一种将特殊类型的电压施加到电机的控制方法。
- 在电动机运行期间将绕组从“星形”电路切换到“三角形”电路,从而降低启动电流;
- 鼠笼式转子极对变化控制;
- 绕线转子电机的感抗连接。
随着电子系统的发展,各种异步电动机的控制变得更加高效和准确。这种引擎在世界各地都在使用,这种机制执行的任务每天都在增加,而且对它们的需求并没有减少。
类似文章: